
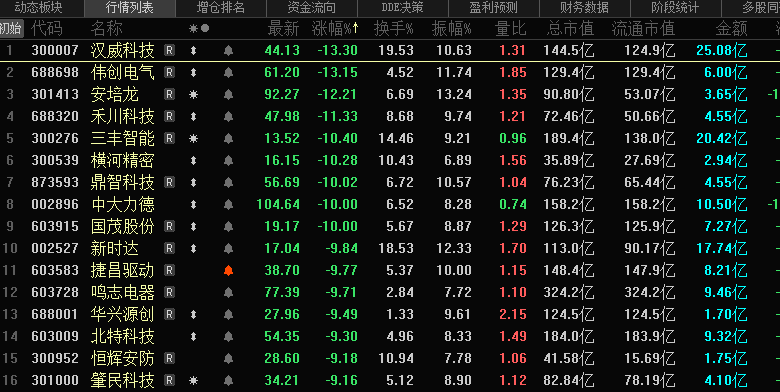
机器人板块早盘走低,中大力德跌停,高盛研报称人形机器人技术拐点不明朗
2月28日上午,机器人行业倒下。截至中午关闭时,中国达到极限,EFT和Sanfeng Intelligent下降了10%以上,Mingzhi电器,绿色谐波,Zhaowei机械和电气,Fengli Intellignent,Buke Co.,Ltd.,Ltd.,Eston,Tosda和其他人跌到7%以上。
在新闻方面,高盛·萨克斯(Goldman Sachs du Qian)的团队于2月27日发布了一份研究报告,称人类机器人技术的转折点仍然不清楚,Yushu Technology的机器人硬件稳定,但仍未准备好执行功能性任务,在热机器人领域倒入冷水盆地。
研究报告说,Yushu类人机器人H1只有19个自由度,因此它仍然无法处理复杂且详细的任务。关于商业化的进展,Yushu Technology表示,在未来2 - 3年内,类人类机器人将很难达到与人类工人相同的效率,但实际应用可能会在5 - 10年内出现。该公司目前的人形机器人运输是数百个单位,满足了大学实验室研发,机器人数据收集和培训的需求。
高盛(Goldman Sachs)预计,到2027/2032,全球人形机器人的运输将为76,000/502,000单位,这比市场期望慢,并且需要更长的时间来吸引由AI提供动力的机器人。
根据公开报告,摩根士丹利(Morgan Stanley)对2月17日至21日的中国自动化和人形机器人机器人产业链进行了深入的研究,并访问了许多公司,包括螺丝,还原器,电动机,传感器等包括螺丝,换档器,电动机,传感器等,表示,尽管快速进步和运动控制是在人类机器人的实际应用中仍需要持续改进Algorith和硬件。
摩根士丹利(Morgan Stanley)表示,尽管许多组件供应商声称他们已经开发并将产品发送给集成商(包括特斯拉)进行测试,能力建设(设备和经验丰富的技术人员/工人),但能力提高(精确加工,产品一致性)在头几年中非常具有挑战性,影响效率,产出和成本。
在哪个阶段,人形机器人的代表性产品是?
Yushu Technology的人形机器人G1已出售给公众。从第一批早期品尝者发送的视频来看,当前的类人动物机器人仍处于“大玩具”阶段,并且非常擅长诸如跳舞,购物和步行狗(机器人狗)等单一任务,但它并没有显示出更实际的应用程序价值,并且无法处理更精致的和更精致的和复杂的任务,例如做家务工作。
木蓬汽车公司首席执行官他最近说,当被问及小米人类机器人在Xiaopeng X9海外航运仪式上的进展时,该仪式基本上所有机器人都在L2阶段。
可以与我们一起工作的类人形机器人有多远?第一个着陆场景是什么?
Yushu Technology的创始人Wang Xingxing最近在接受CCTV的采访中提到,“我个人认为,到今年年底,整个AI人类机器人将达到新的数量级。如果它运行良好,有些基本的人,例如服务行业或某些行业,例如在明年或一年之后,需要更高的需求,因为您的需求可能会越来越高,因为您的需求可能会越来越高,因为家庭的使用可能会越来越高,因为它可能会越来越高,因为它可能会越来越多地使用,因为它可能会越来越多,但可能会有更高的需求,因为它可能会越来越多,但需要更高的需求。成熟。”
从技术上讲,数据稀缺已勒死了通用机器人的脖子。 Dongwu Securities详细分析了训练有用的端到端模型的困难 - 数据瓶颈。现在:
1)数据量差距很大:与1亿个VLM大型型号的数据量相比,单个场景中机器人的当前训练数据量仅为1,000和100,000件的水平,是差距的一百倍。
2)获取机器人数据非常困难:与Internet上的常见语料库进行大型模型培训相比,很难获得机器人培训数据。当前有三种数据采集模式:①实际数据远程操作集合:问题是成本非常高。目前,一组运动捕获设备的成本在数十万范围内。如果一家初创公司依靠远程操作从运动捕获设备中收集数据,则成本很高; ②虚拟数据生成:例如,Galaxy General Motors发布的GRASPVLA通过虚拟仿真技术生成数据,并用于机器人训练,但目前很难解决SIM卡之间的差距。简而言之,使用虚拟仿真数据训练机器人的效果很差。如果这是一个简单的抓握和处理场景,则虚拟数据相对可行,但是如果它涉及灵活的方案,例如柔性物体,例如衣服和被子,则很难使用。因为它涉及柔性对象变形的模拟,所以很难在物理级别进行建模。 ③真正的人数据映射:UMI和DEXCAP(斯坦福机器人团队)正在探索真实的数据映射(也就是说,收集真实的数据并通过特定的映射关系将其转换为机器人数据),但仍然相对较早。
3)远程操作收集的数据是有毒的:①在运动过程中,人类将具有额外的运动轨迹:例如,在移动盒子时,由于远程操作记录时外部干扰,人类可能会暂停几秒钟,但是此暂停对机器人有毒,因为它无法理解人类为什么暂停; ②人的运动轨迹与机器人不一致:目前,市场上的大量机器人主要集中在旋转关节上,而人的上肢和下肢是线性关节,因此人类和机器人的运动轨迹不一致。目前,使用真实的数据来训练机器人本身是有毒的。
4)机器人的本体方案不会收敛,因此很难重复使用数据:例如,由于本体论方案不同,因此很难训练特斯拉本体论收集的数据。
该机构表示,现实情况是该行业目前无法解决上述数据附带问题。但是,目前,每个公司都选择努力以自己的解决方案收集数据,首先在单个情况下实现一定程度的概括,以便可以将更多的人形机器人用于实际使用。该机构认为,可能是3 - 5年后,当市场上有足够的人形机器人数据和硬件解决方案逐渐汇聚,而体现的智能基本模型将显示出一定的智力出现,这将有可能实现真正的端到端端到端体现的体现的智能大型模型。




发表评论
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。